宇宙天気予測の革新
宇宙天気(Space Weather)は太陽活動に起因し、衛星軌道減衰・単粒子障害・帯電・GPSの測位誤差・地上電力網への壊滅的影響をもたらす。従来の数値シミュレーションモデルは予測リードタイムが1〜3時間に限られ、計算コストも高かった。機械学習がこの限界を突破し、LSTM・CNN・Transformerを使った太陽フレア予測では24〜48時間前の予報精度が大幅に向上している。NOAAの宇宙天気予報センター(SWPC)やESA Space Safety Programmeでも、AIの実用導入が進んでいる。
宇宙天気とは何か
太陽活動と地球環境への影響
太陽は絶えず太陽風(プラズマの流れ)を放出しており、突発的なエネルギー解放現象が宇宙天気の根本原因だ。
太陽フレア(Solar Flare) 太陽磁場エネルギーが数分〜数時間で爆発的に解放される現象。X線・UV・粒子線を地球に向けて放射する。強度はX, M, C, B, Aクラスに分類され、X1.0以上が「大型フレア」だ。
CME(Coronal Mass Ejection:コロナ質量放出) 数十億トンのプラズマが太陽から噴出する現象。地球到達まで1〜3日かかり、地磁気嵐の主因となる。
地磁気嵐(Geomagnetic Storm) CMEや高速太陽風の到来で地球の磁気圏が擾乱される。Kpインデックスで評価され、Kp≥5で地磁気嵐と定義する。
 出典: NASA/SDO, “NASA’s SDO Shows Images of Significant Solar Flare”
出典: NASA/SDO, “NASA’s SDO Shows Images of Significant Solar Flare”
人工衛星への影響
宇宙天気が衛星に与える影響は複数のメカニズムを通じて起こる。
| 影響メカニズム | 現象 | 影響を受ける衛星 |
|---|---|---|
| 大気密度増加 | 太陽X線加熱で熱圏が膨張→軌道減衰加速 | 全LEO衛星 |
| 高エネルギー粒子 | 単粒子障害(SEU)、素子劣化 | 全衛星(特に高軌道) |
| 帯電(静電気) | GEO衛星の帯電→放電による機器損傷 | GEO衛星 |
| 電離層擾乱 | GPS電波の屈折・散乱→測位誤差増大 | GPS・測位依存システム |
2003年のハロウィン太陽嵐(X17.2クラス)では、約50機の衛星が何らかの障害を受け、宇宙放射線の影響で欧州の電力網が停電した。2024年5月の太陽嵐(X8.7クラス)では、Starlinkが衛星へのセーフモード移行措置を講じた。
地上インフラへの影響
1989年のモントリオール磁気嵐(Kp=9)では、カナダのケベック州全域(人口600万人)が9時間停電した。送電線の地磁気誘導電流(GIC)が変圧器を損傷させた。X17フレアの太陽嵐が現代の電力網を直撃すれば、数兆ドル規模の経済損失と推定されている。
従来の宇宙天気予測の限界
数値MHDシミュレーション
従来の宇宙天気予測は磁気流体力学(MHD)シミュレーションが中心だ。太陽風・磁気圏・電離層の物理方程式を数値的に解く。
代表的モデル: – ENLIL: 太陽風・CME伝播の3Dシミュレーション – SWMF(Space Weather Modeling Framework):ミシガン大学が開発した統合モデル – WACCM-X: NCSUが開発した熱圏・中間圏モデル
限界: – 計算コスト: フルMHDシミュレーションはスパコンを必要とし、リアルタイム予報には不向き – 予測リードタイム: CMEの地球到達予測は±6〜12時間の誤差が残る – フレア発生予測: 太陽フレアの「いつ、どこで、どれくらいの規模か」の事前予測は特に困難
機械学習による宇宙天気予測の革新
太陽フレア予測
太陽フレアの予測は宇宙天気で最も困難なタスクの一つだ。機械学習は過去の太陽黒点データ・磁場データ・フレア発生履歴から予測モデルを構築する。
主要なアーキテクチャ
CNNによる太陽磁場画像の特徴抽出:
“Convolutional neural networks applied to Solar Dynamics Observatory (SDO) magnetogram images achieve TSS (True Skill Statistic) scores significantly higher than NOAA’s operational flare forecasting model, particularly for ≥M1.0 flares with 24-hour prediction windows.”
LSTMによる時系列磁場変化:
“LSTM networks that model the temporal evolution of solar active region parameters significantly improve flare prediction skill compared to single-snapshot feature-based methods.”
予測性能の比較(X1.0以上フレアの24時間予測):
| 手法 | TSS(True Skill Statistic) | リードタイム |
|---|---|---|
| NOAAオペレーション(従来) | 約0.40〜0.55 | 24時間 |
| SVM(機械学習ベースライン) | 0.55〜0.65 | 24時間 |
| CNN(磁場画像) | 0.65〜0.75 | 24時間 |
| LSTM + CNN(ハイブリッド) | 0.75〜0.82 | 24時間〜48時間 |
地磁気嵐予測(Dst・Kpインデックス)
Dstインデックス(Disturbance Storm Time)は地磁気嵐の強度を示す指標だ。値が負に大きいほど激しい嵐(Dst <−100 nTで大型嵐)。
機械学習によるDst予測の研究: – LSTMベース: 太陽風パラメータ(速度・密度・南向き磁場成分Bz)からDstを1〜6時間先予測。精度は従来の経験的モデル(Kyoto Dst model等)を大幅に凌駕 – Transformerベース(2022〜): 時系列の長距離依存性を捉え、CME到来のタイミング予測でも優れた性能
Kpインデックス予測(3時間周期の地磁気活動指数): – MLP(多層パーセプトロン)とLSTMの組み合わせで、3〜6時間先の予測精度が経験的モデルを超える – 衛星オペレーターのセーフモード移行判断に活用される
熱圏密度・衛星軌道減衰予測
太陽活動が激しいと熱圏(高度80〜500 km)の大気密度が増大し、低軌道衛星の軌道減衰が加速する。2024年の太陽活動極大期(太陽サイクル25のピーク)にはStarlinkが多数の衛星の軌道低下を経験した。
機械学習による熱圏密度予測: – NRLMSISE-00(経験的大気モデル)の残差をMLで補正するアプローチ – STORMモデルの機械学習版:太陽EUVフラックスとgeomagnetic indicesから密度を予測 – 衛星搭載AIと地球観測のデータを活用した密度推定改善
NOAAとESAのAI導入状況
NOAAのSWPC(宇宙天気予報センター)
米国海洋大気局(NOAA)のSWPCは、宇宙天気の世界的な公式予報機関だ。
SWPCでのAI活用状況(2024年現在): – 自動フレア検出: SDO/GOES衛星データから自動でフレアを検出・クラス分類するMLシステムが稼働中 – 短期Kp予測: 機械学習モデルによる0〜3時間の高頻度更新Kp予測の試験運用 – AIアシストアドバイザリー: 予報官の意思決定を支援するAIツールの開発
ESA Space Safety Programme
ESAはSpace Safety Programme(SSP)のもとで宇宙天気AIの研究・開発を推進している。
- ESA Space Weather Service Network: 欧州全体の宇宙天気観測・予報ネットワーク
- HESPERIA(Horizon 2020プロジェクト): 太陽エネルギー粒子イベント予測のMLモデル開発
- SWICo(Space Weather Instrumentation, Measurement, Modelling and Risk): 太陽・磁気圏観測データのAI解析
展望:2025-2030年の宇宙天気AIロードマップ
HERMES(NASA)とリアルタイムAI統合
NASAのHERMES(Heliophysics Environmental and Radiation Measurement Experiment Suite)は月軌道プラットフォーム(Gateway)に搭載が計画された粒子・磁場計測装置だ。月近傍での観測データをAIがリアルタイム解析し、より精密な宇宙天気予報の実現を目指している。
Foundation Model for Space Weather
大規模な太陽観測データ(SDO、SOHO、STEREOなど)を使った宇宙天気特化基盤モデルの研究が始まっている。地球観測のPrithviモデル(衛星地球観測AI参照)と同様に、大規模事前学習から様々な宇宙天気タスクへのファインチューニングが可能になる。
まとめ
宇宙天気予測AIは、従来の数値MHDシミュレーションが持つ計算コスト・予測精度の限界を突破しつつある。LSTM・CNNによる太陽フレア予測では24〜48時間リードタイムでのTSS0.75超が達成され、地磁気嵐予測では経験的モデルを大きく上回る精度が得られている。NOAAのSWPCやESAのSpace Safety Programmeでも実用導入が進み、衛星オペレーターのセーフモード判断・GPS補正・電力網保護に直接貢献している。衛星搭載AIのリアルタイム宇宙天気センシングと組み合わせることで、宇宙インフラを守る総合的な宇宙天気AIシステムの実現が近づいている。
参考文献
- Huang, X. et al., “Deep Learning Based Solar Flare Forecasting Model”, The Astrophysical Journal, 2018. IOP Science
- Liu, H. et al., “Predicting Solar Flares using SDO/HMI Vector Magnetic Data with a Hybrid Deep Learning Model”, The Astrophysical Journal, 2019. IOP Science
- NOAA Space Weather Prediction Center, “Space Weather Services”, 2024. NOAA SWPC
- ESA, “Space Weather Service Network”, 2024. ESA Space Safety
- NASA/SDO, “NASA’s SDO Shows Images of Significant Solar Flare”, 2017. NASA Image Library
 出典:
出典:  出典:
出典:  出典:
出典:  出典:
出典:  出典:
出典: 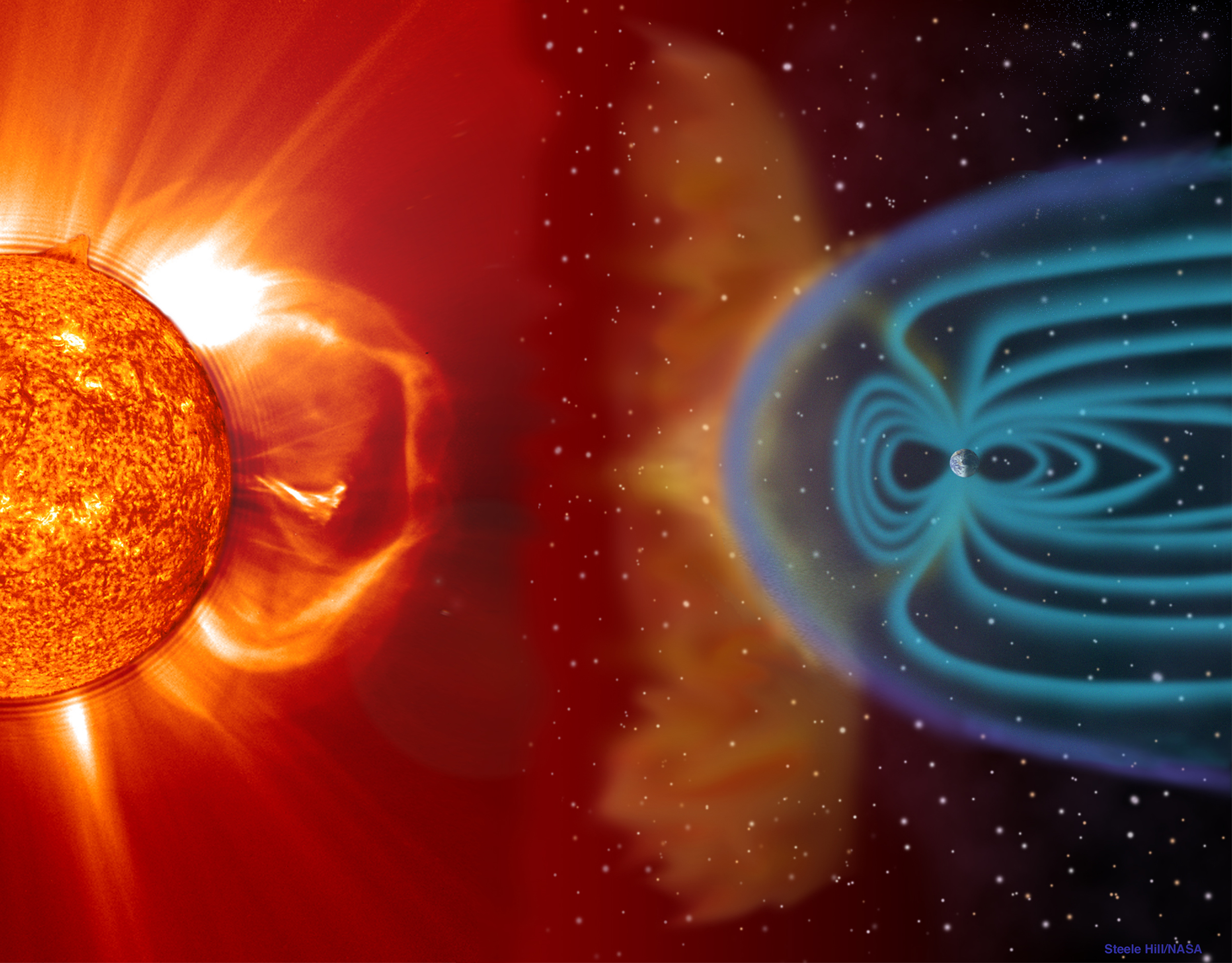 出典:
出典:  出典:
出典:  出典:
出典:  出典:
出典:  出典:
出典: