深宇宙自律AIとは
深宇宙探査における自律AIは、通信遅延という物理的な制約を超えるための唯一の解だ。地球と火星間の通信遅延は3〜24分(往復最大48分)に達し、地球からのリアルタイム制御は根本的に不可能だ。NASAのAEGISシステムはMars Exploration Rovers(MER)からPerseveranceまで、軌道上での自律科学判断を実現してきた。Perseveranceの自律走行システムAutoNavは地上計画比で走行速度を50%向上させ、AIによる自律性が探査ミッションの科学的生産性を劇的に改善することを証明した。
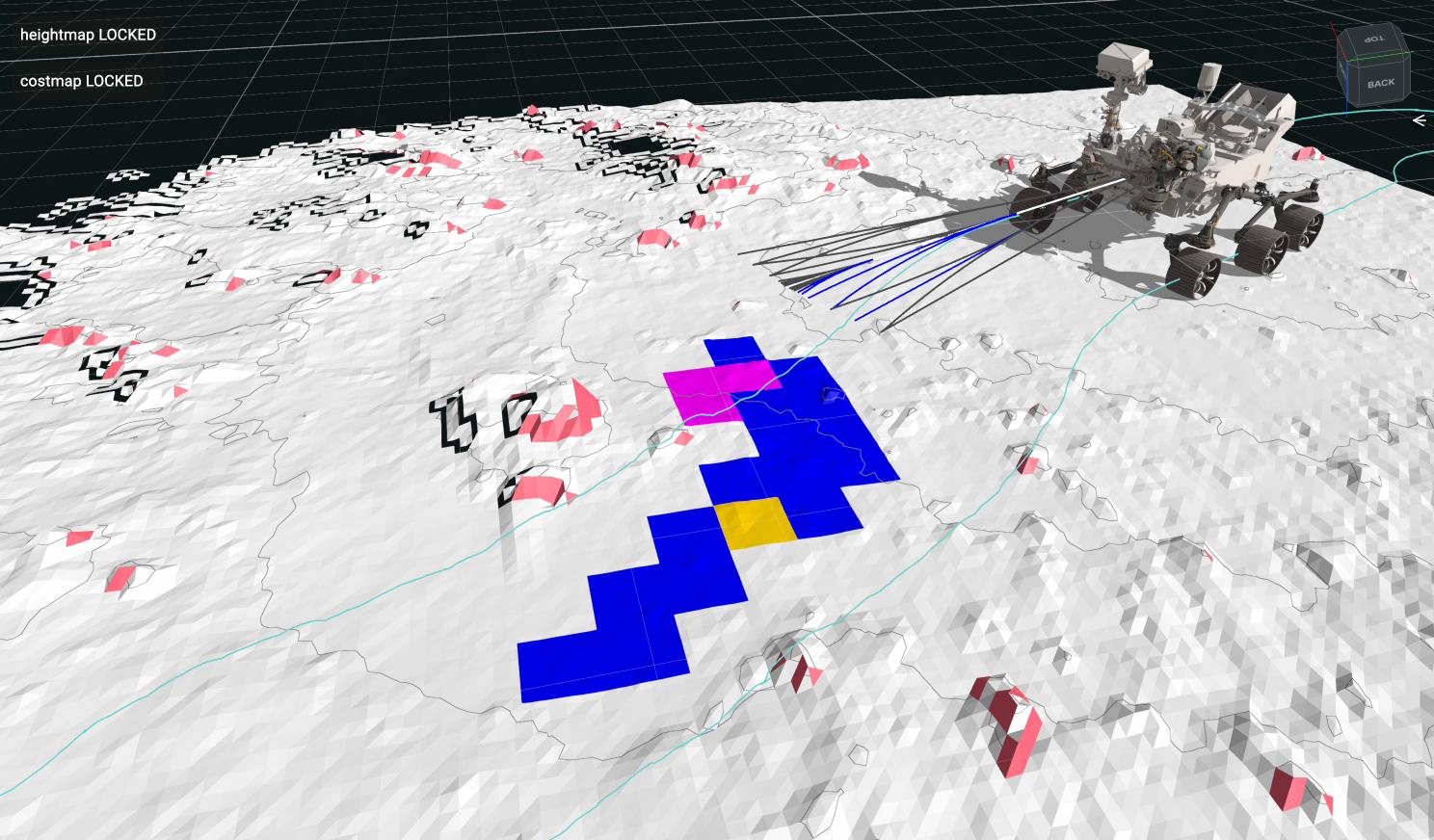
 出典: NASA/JPL-Caltech, “Perseverance’s First Autonav Drive”
出典: NASA/JPL-Caltech, “Perseverance’s First Autonav Drive”
通信遅延:深宇宙探査の根本的制約
惑星間距離と光速の壁
電磁波(電波・光)は真空中を秒速約30万kmで伝搬する。これは物理法則が定める究極の速度制限であり、どんな技術進歩でも乗り越えられない。
| 目的地 | 最小距離 | 最大距離 | 片道遅延(最大) |
|---|---|---|---|
| 月 | 36万 km | 41万 km | 約1.4秒 |
| 火星 | 5,600万 km | 4億 km | 約22分 |
| 木星 | 6億 km | 9億 km | 約50分 |
| 冥王星 | 43億 km | 75億 km | 約4.2時間 |
| 太陽系外縁 | 〜150億 km | − | 約14時間 |
火星での往復遅延は最大48分。地球のオペレーターが探査機に指令を出して応答が返ってくるまで、約1時間かかる計算だ。この遅延は危機的な状況(急斜面への差し掛かり、砂への埋没など)で探査機を全損させかねない。
通信の断絶期間(Solar Conjunction)
さらに深刻なのが太陽合(Solar Conjunction)だ。地球・太陽・火星が一直線に並ぶ約2週間、太陽の電波干渉により通信が完全に不可能になる。この間、探査機は完全に自力で生存・科学観測を継続しなければならない。2021年のPerseveranceの太陽合では、2週間にわたって地球からの指令なしで動作し続けた。
AEGIS:NASA火星ローバーの「眼と判断力」
システムの概要
AEGIS(Autonomous Exploration for Gathering Increased Science)は、NASAジェット推進研究所(JPL)が開発した軌道上・表面自律科学システムだ。「目標を自分で選んで観測する」という機能を宇宙機に与えた。
“AEGIS enables rovers to autonomously target and acquire science data without ground-in-the-loop, which is especially powerful when communication windows are limited or during solar conjunction.”
AEGISの動作フロー: 1. ローバーの広角カメラが周囲を撮影 2. 搭載AIが地質学的に興味深い岩石・地形を自動識別 3. 高解像度カメラやレーザー分光計(ChemCam/SuperCam)を自律的に向ける 4. 取得データを優先的にダウンリンク
MERからPerseveranceまでの進化
AEGISの運用実績は火星ローバー世代を追って積み上げられてきた。
| ローバー | 期間 | AEGIS適用 | 主な実績 |
|---|---|---|---|
| Opportunity | 2004〜2018年 | 初期AEGIS | 岩石ターゲティングの自律化 |
| Curiosity | 2012年〜現在 | AEGIS v2 | ChemCam自律ターゲット選定 |
| Perseverance | 2021年〜現在 | AEGIS v3 + WATSON | SuperCamと連携した自律科学 |
特にCuriosityでは、AEGISによりChemCamの自律ターゲット選定回数が全取得の半数以上を占めるようになった。地球のサイエンティストが選んだターゲットと同等以上の科学的価値があることが確認されている。
AutoNav:自律走行の革命
地上パスプランとの比較
従来の火星ローバー走行は、地球のエンジニアが前日に撮影した画像を解析し、翌日の走行経路を計画して送信するサイクルだった。火星の1日(sol)に対して、実際に走行できる距離は非常に限られた。
AutoNav(Autonomous Navigation)は、ローバー自身が周囲のステレオカメラ画像から3D地図を構築し、障害物を回避しながら目的地まで自律走行する。
“Perseverance’s AutoNav capability enables the rover to drive at speeds more than twice those achieved by Curiosity, and to cover more terrain in a single drive.”
― NASA JPL, “Perseverance Rover: Autonomous Navigation” (2021)
 出典: NASA/JPL-Caltech, “Perseverance AutoNav Avoids a Boulder”
出典: NASA/JPL-Caltech, “Perseverance AutoNav Avoids a Boulder”
AutoNavの導入効果(Perseverance vs Curiosity比較):
| 指標 | Curiosity(地上計画) | Perseverance(AutoNav) |
|---|---|---|
| 1sol平均走行距離 | 〜50 m | 〜200 m |
| 最長1sol走行距離 | 〜220 m | 〜700 m |
| 要するオペレーター時間 | 1〜2時間/sol | 30分以下/sol |
AutoNavはVisualOdometry(視覚的な自己位置推定)とHazard Detectionの組み合わせで機能する。
EDRN(Enhanced Deep Learning Navigation)
2022年以降、Perseveranceには機械学習ベースの地形評価モジュールが追加された。従来の幾何学的障害物検出に加え、岩石の硬さ・砂地の轍リスクなどをCNNが評価し、より安全で効率的な経路を選択する。
NASA 2040 AI/ML 戦略
宇宙科学へのAI統合ロードマップ
NASAは「AI/ML for Space Science 2040」ロードマップを策定し、宇宙探査・科学観測へのAI統合を長期的に計画している。主な柱は以下の通りだ。
データ解析自動化 ジェームズ・ウェッブ宇宙望遠鏡(JWST)は毎日60 GBのデータを送信する。スペクトル解析・天体分類・異常検知をAIが自動化することで、サイエンティストが人力では処理しきれない量のデータを活用できる。
自律科学判断の高度化 「何を観測するか」の判断を探査機自身が下す自律性の向上。AEGIS v4以降では機械学習ベースの科学価値評価モデルが統合される予定だ。
フォールト管理と自己修復 複雑なシステム故障の自律診断・修復。深宇宙では地球からのサポートが数時間遅れるため、探査機自身が問題を認識して対処できる能力が必要だ。
近未来の深宇宙自律AI
Europa Clipper(2024年打上済み)
木星の衛星エウロパの地下海洋を探査するESA/NASAのEuropa Clipperは、片道通信遅延が約50分に達する環境で運用される。自律フォールト保護と科学データ優先選択のAIが搭載されている。
Dragonfly(2028年打上予定)
NASAのDragonflyは土星の衛星タイタンに着陸するロータークラフトだ。タイタンとの通信遅延は70〜90分に達する。ドローン飛行の自律制御・着陸地点の自律選定・科学サンプリングの自律判断が不可欠で、最も高度な深宇宙自律AIを必要とするミッションの一つだ。
月軌道プラットフォーム Gateway
NASAのアルテミス計画で建設される月近傍の宇宙ステーションGatewayには、月面ローバーの遠隔操作支援AIが搭載される予定だ。地球と月の通信遅延(最大2.6秒)でも、ロボットアームの精密操作には自律補完が必要だ。
深宇宙自律AIの技術的アーキテクチャ
オンボード推論のリソース制約
深宇宙探査機は宇宙線の多い環境(太陽活動、宇宙線)で動作するため、放射線耐性のある計算機を使わなければならない。Curiosityに搭載されたBAE Systems RAD750プロセッサは200 MHzで動作する放射線耐性CPUだ。これはスマートフォンのプロセッサの数千分の1の性能しかない。
この極めて限られたリソースで自律AIを動かすためのアプローチ: – 軽量モデル: MobileNet系の量子化モデル、INT8精度での推論 – ルールベースとMLのハイブリッド: 不変な物理法則・安全制約はルールベース、科学判断はML – コンテキスト圧縮: 必要最小限の状態表現だけを保持
強化学習の深宇宙応用
強化学習による衛星姿勢制御と同様の手法が、深宇宙探査の経路計画にも応用されつつある。特にモデルベース強化学習(MBRL)は、環境モデルを内部に持つことで少ない試行回数で最適な行動を学習でき、シミュレーションでの事前学習を実機に転用しやすい。
まとめ
深宇宙探査における自律AIは、通信遅延という絶対的な物理制約を克服するために不可欠な技術だ。AEGISは火星ローバーの科学的生産性を劇的に向上させ、AutoNavはPerseveranceの走行距離を4倍近くに伸ばした。NASA 2040 AI戦略が示すように、今後の深宇宙ミッション(Europa Clipper、Dragonfly)はより高度な自律性を必要とする。自律ランデブー・ドッキング技術の進歩と合わせて、宇宙機の自律性は今後10〜20年で飛躍的に高まり、人類の探査範囲を太陽系全域へと押し広げる原動力となるだろう。
参考文献
- Wagstaff, K. et al., “Onboard Autonomy on the Curiosity Mars Rover,” IEEE Robotics & Automation Magazine, 2016. IEEE Xplore
- NASA Jet Propulsion Laboratory, “Perseverance Rover: Autonomous Navigation”, 2021. NASA JPL
- NASA, “AI/ML for Space Science 2040 Roadmap”, 2023. NASA科学局
- NASA/JPL-Caltech, “Perseverance’s First Autonav Drive” (画像 PIA24722), 2021. NASA Image Library
- NASA/JPL-Caltech, “Perseverance AutoNav Avoids a Boulder” (画像 PIA26073), 2024. NASA Image Library
コメントを残す